4 Luftqualitätmessung
Einführung
Ziel dieser ersten Übung ist es den BME688 Sensor kennen zu lernen und die Sensordaten auszulesen. Der BME688 ist ein 4-in-1 Sensor für Temperatur, Luftdruck, Luftfeuchtigkeit und Gas Scanner VOC. Der Sensor verfügt über eine I2C Schnittstelle, die mit der Python Library bme680-python angesteuert und die Sensordaten ausgelesen werden können.
Unterlagen: E01_Luftqualitaet.zip
Vorbereitung
- Lest das Kapitel im Anhang zu Raspberry Pi
- Konzentriere Dich auf die wichtigsten Details zur Inbetriebnahme des Raspberry Pi
- Lest die Dokumentation zum BME688 Sensor „Gas Sensor BME688“ (2022)
- Konzentriere Dich auf die Beschreibung der Schnittstelle und technische Spezifikation auf dem Datenblatt
| Unterlagen | |
|---|---|
| Produkt | BME688 4-in-1 Air Quality Breakout |
| Datenblatt | Bosch Datasheet BME 688 |
| GitHub | bme680-python Library mit Beispielen |
| Tutorial | Getting started with BME680 Breakout |
BME688
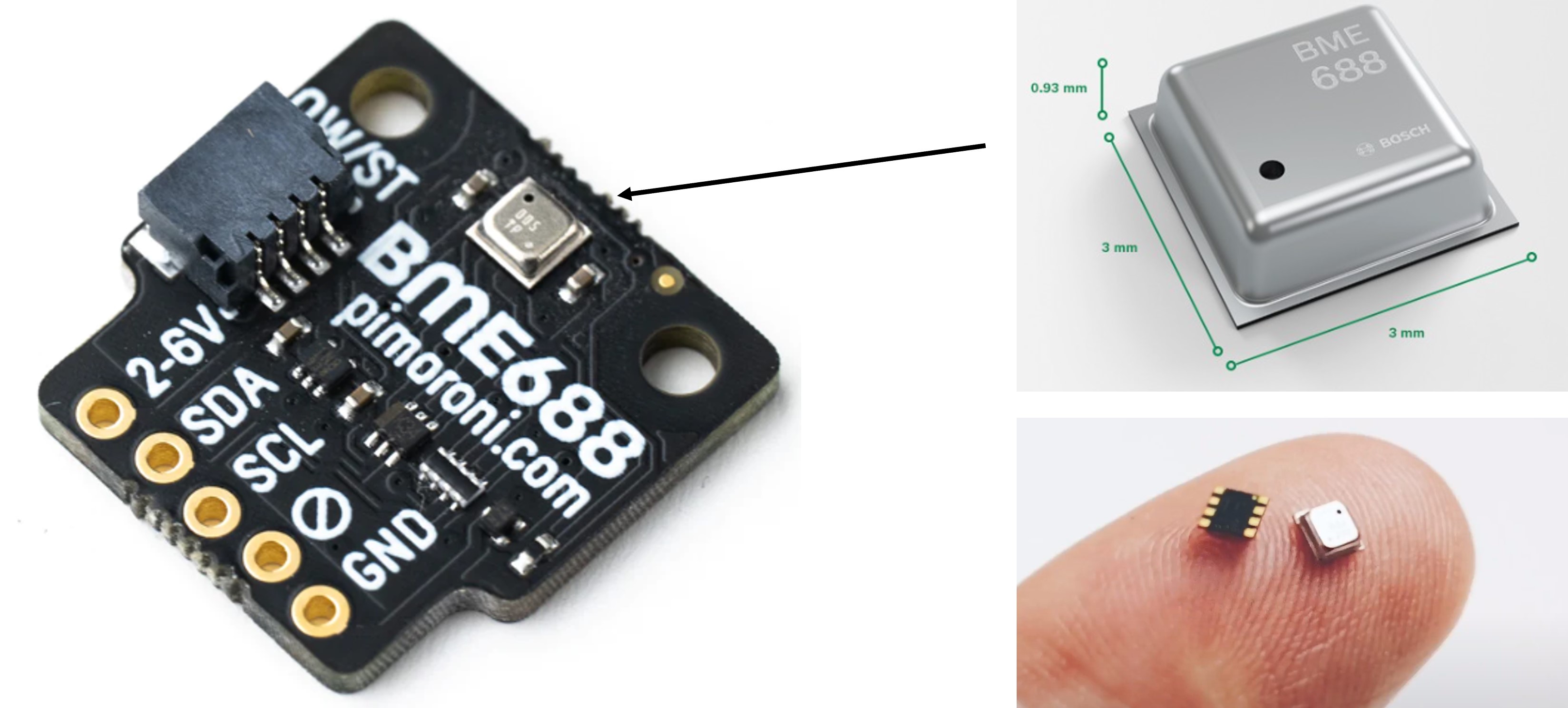
BME688 - Bosch Sensor für Temperatur, Luftdruck, Luftfeuchtigkeit, Gas Scanner VOC (Abb. 4.1)
- Temperatur +/-0.5°C (-40° .. -85°)
- Luftdruck +/-0.12hPa (300…1100hPa)
- Luftfeuchtigkeit +/-3% (0 …100%)
- Gas Scanner VOC, VSCs (AI)
- Python, C Library
- Raspberry Pi Pins 1,3,5,7,9
Übungsaufbau
- Schliesse den Raspberry Pi an Monitor, Keyboard und Maus an oder verbinde Dich mit diesem über SSH (und SFTP).
- Erstelle auf dem Raspberry Pi im
DocumentsOrdner einen neuen OrdnerBME688, in welchem Du Änderungen und neue Dateien für diese Übung speichern kannst. - Schliesse den Sensor BME688 an den Raspberry Pi über die Breakout Garden I2C Schnittstelle an.
Sensor Ausrichtung beachten
Beim Anschliessen der Sensoren in die Schnittstellen des Breakout Garden unbedingt die korrekte Ausrichtung beachten! Die Beschriftung der Anschlüsse auf dem Sensor und dem Breakout Garden müssen übereinstimmen!

Kontrolle der Hardware
Kontrolliere mit dem Befehl i2cdetect -y 1 ob der Raspberry Pi mit dem Sensor verbunden ist und der Raspberry Pi Zugriff auf den Sensor hat. Erscheint eine Zahl, dann hat der Raspberry Pi den Sensor auf dem I2C Bus erkannt. Falls Du mehr über das Program und den Befehl wissen möchtest, kannst Du mit dem Befehl man i2cdetect das Manual man aufrufen.
i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- 76 -- i2cdetect installieren, falls das Programm nicht existiert:
sudo apt-get update
sudo apt install python3-smbus
sudo apt install i2c-toolsHinweis: Damit der Befehl i2cdetect funktioniert, muss der I2C Bus aktiviert sein. Dies kann mit dem Befehl sudo raspi-config im Menü Interfacing Options und I2C aktiviert werden.
Kontrolle der Installation
Aktiviere die virtuelle Python Environment (hier unter ~/.env) und teste ob die für die Übung erforderlichen Python Libraries installiert sind. Aktiviere über folgenden Befehl die virtuelle Umgebung, welche für diese Übungen im Homeordner ~/.env erstellt wurde1. Die aktivierte Umgebung wird durch die Anzeige des Umgebungsname in der Kommandozeile angezeigt, hier mit (.env).
source ~/.env/bin/activateTeste ob die für die Übung erforderlichen Python Libraries installiert sind. Ein einfacher Test zur Kontrolle, ob ein Modul installiert ist, ist über das Import Statement des Moduls über die Python Konsole im Terminal. Falls kein Fehler auftritt, ist das Modul in der virtuellen Environment installiert.
- 1
-
mathModul existiert - 2
-
numpyModul existiert nicht
Installiere das Modul mit folgendem Befehl, falls es nicht installiert ist.
pip install bme680Kopiere (Clone) die Library mit den Beispielen auf den Raspberry Pi
Wechsle in den Ordner Documents und kopiere mit folgenden Befehlen die Library auf Deinen Raspberry Pi.
cd Documents
git clone https://github.com/pimoroni/bme680-python
cd bme680-python/examplesAufgabe 1: Sensormessungen ausführen
Teste das Beispiel read-all.py im Ordner examples. Dieses Beispiel gibt die Temperatur, Luftdruck und Luftfeuchtigkeit des Sensors BME 688 aus.
python read-all.pyMit Ctrl+c kann das Script wieder gestopppt werden. Die Ausgabe sollte in etwa so aussehen (gekürzt):
# Output Beispiel
read-all.py - Displays temperature, pressure, humidity, and gas.
Press Ctrl+C to exit!
Calibration data:
par_gh1: -10
…
Initial reading:
gas_index: 0
gas_resistance: 1338124.79581836
heat_stable: False
humidity: 44.397
meas_index: 0
pressure: 990.82
status: 32
temperature: 28.89
Polling:
28.89 C,990.82 hPa,44.39 %RH
28.91 C,990.82 hPa,44.37 %RH,5684.846331497602 Ohms
28.94 C,990.80 hPa,44.31 %RH,5684.846331497602 Ohms
28.97 C,990.81 hPa,44.24 %RH,5684.846331497602 Ohms
29.00 C,990.81 hPa,44.19 %RH,5684.846331497602 Ohms
29.03 C,990.82 hPa,44.12 %RH,5684.846331497602 OhmsFolgendes Code Snippet zeigt eine gekürtzte Version des read-all.py Python Beispiels, der die Temperatur, Luftdruck und Luftfeuchtigkeit mit der BME680 Library ausgibt.
#!/usr/bin/env python
import bme680
try:
1 sensor = bme680.BME680(bme680.I2C_ADDR_PRIMARY)
except (RuntimeError, IOError):
sensor = bme680.BME680(bme680.I2C_ADDR_SECONDARY)
# Oversampling Einstellungen
2sensor.set_humidity_oversample(bme680.OS_2X)
sensor.set_pressure_oversample(bme680.OS_4X)
sensor.set_temperature_oversample(bme680.OS_8X)
sensor.set_filter(bme680.FILTER_SIZE_3)
print('Sensordaten:')
try:
while True:
3 if sensor.get_sensor_data():
output = '{0:.2f} C,{1:.2f} hPa,{2:.3f} %RH'.format(
sensor.data.temperature,
sensor.data.pressure,
sensor.data.humidity)
print(output)
except KeyboardInterrupt:
pass- 1
- Testen der beiden möglichen I2C Adressen
- 2
- Oversampling Einstellungen können Messungen durch Mitteln verbessern und das Rauschen und Drifts reduzieren
- 3
- Sensordaten auslesen
Übung 4.1 BME 688
Studiert die Python Skripte und online Tutorial zum Sensor
- Wie wird auf den Sensor zugegriffen?
- Wie reagiert der Feuchtigkeitssensor auf Änderungen?
- Wie hoch sind die Werte für den Luftdruck, was sind Vergleichswerte?
- Wie könnt Ihr einfach Sensorwerte in eine Datei schreiben?
Aufgabe 2: Berechnung der Atmosphärenkorrektur für Distanzmessungen (optional)
Geödätische Distanzmessverfahren wie bei der Tachymetrie (Totalstationen) und Laserscanning benötigen eine Korrektur der Messwerte, um die Distanz zwischen zwei Punkten auf der Erde zu berechnen. Über eine Massstabskorrektur (ppm [mm/km]) können distanzproportionale Reduzierungen berücksichtigt werden, die Projektionsverzerrung, Reduktion auf Meereshöhe und die Atmophärenkorrektur berücksichtigen. Die Luftfeichtigkeit beeinflusst Distanzmessungen in feuchtem und heissen Klima. Diese muss den zur Messzeit geltenden atmosphärischen Bedingungen angepasst werden.
Die Korrektur wird als Atmosphärenkorrektur bezeichnet und ist abhängig von der Temperatur, dem Luftdruck und der Luftfeuchtigkeit. Die Korrektur wird in ppm (parts per million [mm/km]) angegeben und kann mit folgender Gleichung 4.1 berechnet werden (Grimm, 2023; Leica Geosystems, 2022, S. 87) und gilt für die Distanzmessung mit sichtbaren roten Laser
\[ \Delta D_1 = 286.338 - \begin{bmatrix}\frac{0.29535 \cdot p}{(1+\alpha \cdot t)}-\frac{4.126 \cdot 10^{-4} \cdot h}{(1+\alpha \cdot t)} \cdot 10^x\end{bmatrix} \tag{4.1}\]
\[\begin{aligned} & \Delta D_1 && \text{Atmosphärische Korrektur} && [ppm]\\ & p && \text{Luftdruck} && [mbar]\\ & t && \text{Lufttemperatur} && [°C]\\ & h && \text{relative Luftfeuchte} && [\%]\\ & \alpha && = \frac{1}{273.15} \\ & x && = (7.5 \cdot \frac{t}{237.3 +t}) + 0.7857 \\ \end{aligned} \]
Folgende Funktion in Python berechnet die Atmosphärenkorrektur für Geodätische Distanzmessverfahren basierend auf der Gleichung 4.1
import math
def calculate_atmospheric_correction(temperature, air_pressure, humidity):
# Constants
ALPHA = 1 / 273.15
X = (7.5 * temperature / (237.3 + temperature)) + 0.7857
# Interim results
denominator = 1 + ALPHA * temperature
formula0 = 286.338
formula1 = 0.29535 * air_pressure / denominator
formula2 = 4.126 * 10 ** (-4) * humidity / denominator
formula3 = 10 ** X
# ppm-calculation
correction_ppm = round(formula0 - (formula1 - formula2 * formula3), 2)
# Return important values as a dictionary
result = {
"temperature": temperature,
"air_pressure": air_pressure,
"humidity": humidity,
"correction_ppm": correction_ppm
}
return resultFür Distanzmessungen höchster Genauigkeit sollte die atmosphärische Korrektur auf \(1 ppm\) genau bestimmt werden, folglich sollten die Messwerte mindestens folgenden Genauigkeit aufweisen: die Temperatur auf \(1°C\), der Luftdruck auf \(3 mbar\) (\(1 Millibar= 1 hPa\)) und die Luftfeuchtigkeit auf \(20 %\) genau bestimmt werden (Leica Geosystems, 2022, S. 87).
Übung 4.2 Atmosphärenkorrektur
Nutzt die Funktion calculate_atmospheric_correction um eine atmosphärische Korrektur mit den momentan gemessenen amtmosphärischen Bedingungen zu berechnen.
- Wie hoch ist die Korrektur mit den Werten des BME688 Sensors?
- Wie hoch ist dieselbe Korrektur bei doppelter Luftfeuchtigkeit?
- Wie hoch ist die Korrektur bei 20°C, 1000hPa und 50% sowie 100% Luftfeuchtigkeit?
- Erfüllt der BME688 Sensor die Anforderungen für Distanzmessungen höchster Genauigkeit?
In dieser Übung wird die Python Virtual Environment
.envim Homeordner~/erstellt und aktiviert. Diese kann auch an einem Ort erstellt werden, beispielweise projektbasiert. Erstellen einer Virtual Environment:python -m venv ~/Development/Projekt1/env↩︎